

产品世界










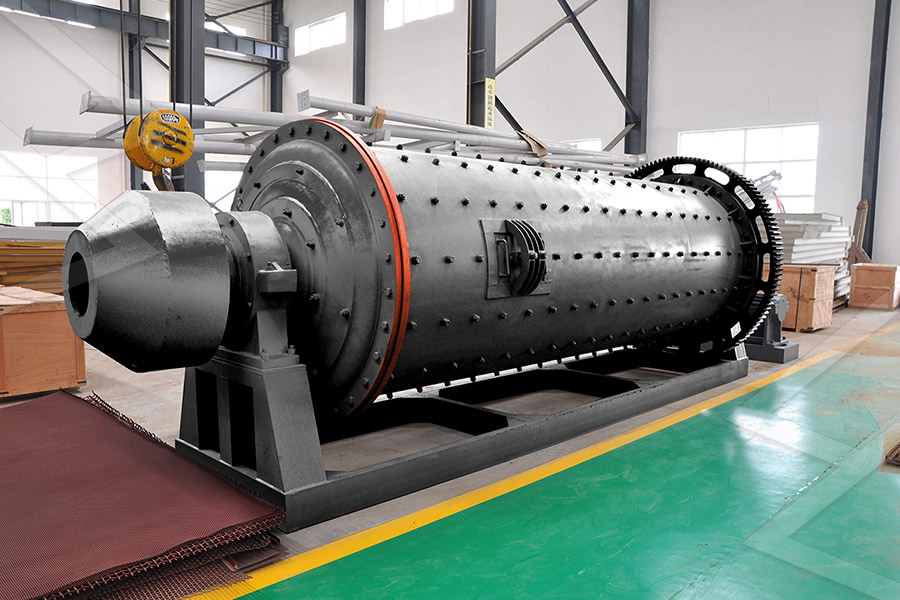
产品系列完备,打通粗碎、中碎、细碎和超细碎作业






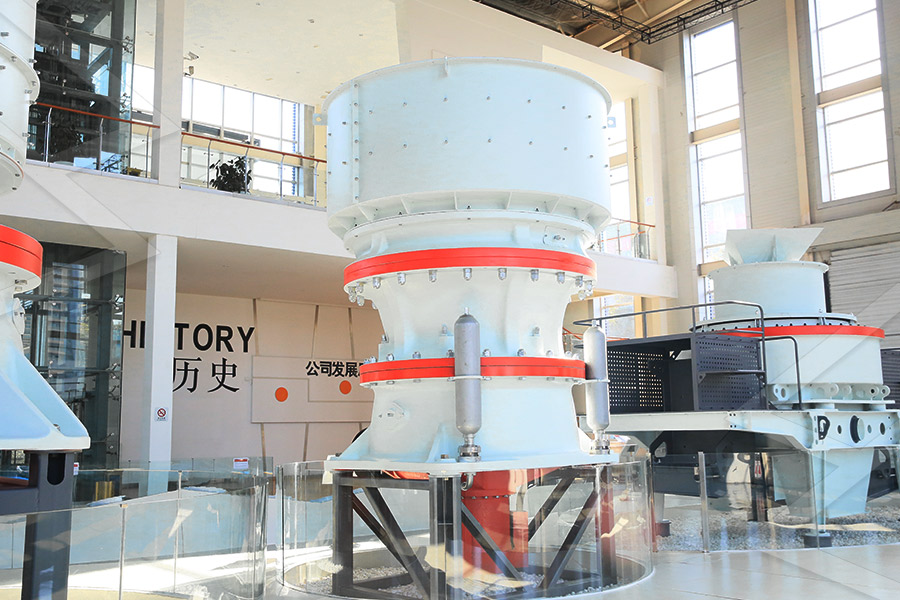

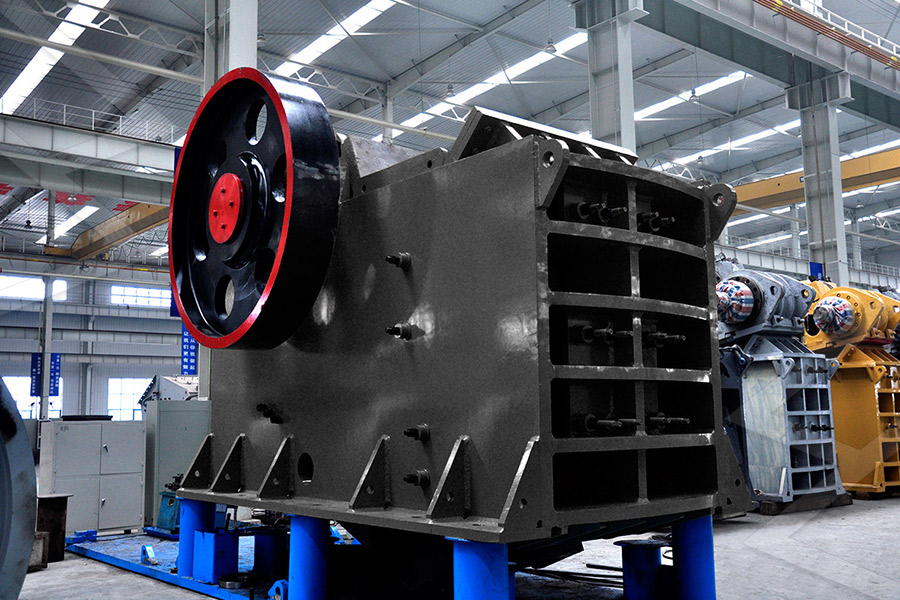







VSI家族与VU骨料优化系统共担精品机制砂制备重任













反形机器反形机器反形机器
 2021-07-19T00:07:01+00:00
2021-07-19T00:07:01+00:00
双足行走机器人,目前为啥基本上都是反关节方式的? 知乎
2023年8月1日 在双足机器人的步行、奔跑应用中,目前主流的腿足结构有仿人型(所谓“大脚掌”)、鸟足型(所谓“膝盖反曲”)、点足型(所谓“没有脚掌”)等。很多人都习惯了用 2024年1月3日 V01弧焊机器人运动学反解及臂形标志的确定CNKI数字图书馆V01弧焊机器人运动学反解及臂形标志的确定,全文下载。为了对V01 弧焊机器人深层次的开发,需 反形机器

6自由度关节机器人运动学反解的共形几何代数方法
2016年7月25日 针对6自由度关节机器人反解问题提出一种利用共形几何代数求解的新方法。 首先以旋转关节轴线和旋转平面为基础建立无坐标系机器人模型,并定义肩部、肘部 2018年1月8日 摘要:提 出了一种基于反演设计和RBF神 经网络自适应的非完整移动机器人轨迹跟踪方法首 先,设计一个虚拟的速度控制律使得输出跟踪误差尽可能小;然 后,利 用反 doi 基于反演技术和神经网络的移动机器人控制

反形机器
反形机器 反螺旋双驱异形机器人 本发明提供了一种反螺旋双驱异形机器人,外形呈流线梭锥形,分为前、中、后三段,在前段和后段的外表面分别装有旋向相反的连续螺旋形叶 antiparallelcrank mechanism 定 义 连杆与机架的长度相等、两个曲柄长度相等但转向相反的双曲柄机构。 应用学科 机械工程(一级学科),机构学(二级学科),连杆机构(三 逆平行四边形机构 百度百科

中国科学院等离子体物理研究所
2015年9月9日 这种被称为反场位形(FRC)的方法自上世纪60年代起便为人所知。 然而,尽管进行了几十年的研究,但科学家只能使等离子体团在散开或熔化前维持约03毫秒。 1997年,出生于加拿大的加州大学欧文分 2020年12月8日 两者差异: 1、结构 反击破由转子、板锤、打击板、机架、反击板、传动部件等组成,打击板刚性连接在转子上。 锤破由转子、锤头、锤架、销轴、机架、破碎板、筛板、传动部件等组成,锤头铰支在锤 反击式破碎机和鄂式破碎机区别 知乎
反平行四边形轮式移动机器人的设计【说明书+CAD
2017年12月21日 本文主要以反平行四边行机构为基础来设计反平行四边形轮式移动机器人的的整体方案。 该机构采用统一动作、协调控制的原则,通过连杆的摆动来实现机器人主体的翻转从而进行越障的运动,该机器人 2017年9月1日 有了强弱反型区的模型之后,中间反型区的模型可以通过插值公式得到。可以验证,这个公式在强弱反型区均适用。短沟道效应 讲完了MOS管在不同反型区的模型,接下来我们就谈一谈两个短沟道效应——沟道长度调制效应和速度饱和效应。(1)沟道长度调制EKV模型:反型区,短沟道效应,以及秒掉拉扎维 机器之心

反形机器反形机器反形机器
反形机器反形机器反形机器 T04:08:26+00:00 反形机器 本发明提供了一种反螺旋双驱异形机器人,外形呈流线梭锥形,分为前、中、后三段,在前段和后段的外表面分别装有旋向相反的连续螺旋形叶片,当两连续螺旋形叶片随各自的梭 反形机器,反击 2021年6月21日 1、方法1 式 (1)联立以下三角恒等式: 利用MATLAB解符号方程组 (1) (2),代码如下: clc; clear; syms k1 k2 k3 theta sinTheta cosTheta real result = solve (k1 * sinTheta + k2 * cosTheta == k3, sinTheta^2 + cosTheta^2 == 1, [sinTheta, cosTheta]); sinTheta = simplify (resultsinTheta) cosTheta = simplify (resultcosTheta 机器人运动学逆解中最常用的三角方程(附代码) 古月居

反形机器
2008年4月19日 V01弧焊机器人运动学反解及臂形标志的确定 崔鲲 孙论强 维普 为了对V01弧焊机器人深层次的开发,需要首先剖析其运动学模型,求解的反臂形问题。本文利用几何解法,针对V01弧焊机器人建立了相应的逆运动学算法,解决了求解臂形标志。2016年7月25日 摘要: 机器人运动学模型的建立普遍利用DenavitHartenberg(DH)参数法和旋量法,但是DH参数法的几何意义不够明确,旋量法则有低自由度、关节轴线相交于1点的结构限制。 针对6自由度关节机器人反解问题提出一种利用共形几何代数求解的新方法。首先以旋转关节轴线和旋转平面为基础建立无坐标系 6自由度关节机器人运动学反解的共形几何代数方法 nwpu

反形机器
反平行四边形轮式移动机器人的设计zip 皮克文库 本文主要以反平行四边行机构为基础来设计反平行四边形轮式移动机器人的 的整体方案。 该机构采用统一动作、协调控制的原则,通过连杆的摆动来实现机 器人主体的翻转从而进 2023年11月2日 9、对机器人的进行反算机构配置如图115,116 所示。规划机器人抓取到释放的动作路径。图115路径约束的位置配置 图116自动生成的仿真序列 10、配置信号适配器如图117所示导入握爪的抓握与释放参数,在信号中添加2个输入信号,公式如图所示 NX MCD机器人的反算机构驱动

人形机器人,一场事先张扬的反常识界面新闻 JMedia
2023年6月21日 我们认为上述这段文字形象的表明了人形机器人的意义和优势: 与其把所有工具全部重新设计,不如生产出能模仿人类外形和行为方式的机器人。 TA完美接入人类现有生活、进入所有人类已经存在的场景、使用所有人类正在使用的工具。 一句话,我们一切 6自由度关节机器人运动学反解的共形几何代数方法机器人运动学模型的建立普遍利用DenavitHartenberg(DH)参数法和旋量法,但是DH参数法的几何意义。 目前,国内机器人产业发展火热,作为“机器人+”模式发展渗透的重要领域之一,安防机器人也逐渐走进人们的视野中。反形机器
反形机器
2016年2月24日 澳洲推出新型反无人机枪:温柔截停无人机机器人网 Robot机器人网 2018年2月7日 澳大利亚制造商DroneShield公布了新款DroneGun Tactical战术形反无人机步枪,造型充充着经典科幻电影《银翼杀手》的后启示录赛博朋克风格。 反形百度百科反平行四边形轮式移动机器人的设计zip 皮克文库 本文主要以反平行四边行机构为基础来设计反平行四边形轮式移动机器人的 的整体方案。 该机构采用统一动作、协调控制的原则,通过连杆的摆动来实现机 器人主体的翻转从而进 反形机器

6自由度关节机器人运动学反解的共形几何代数方法pdf
2017年10月11日 关节的旋转角,完成机器人反解计算。针对目前工业 1.3外积和相交 常用的人机协作6自由度关节机器人,利用本文的反 假定共形空间内的2个几何对象A和曰相交 解方法实现了其运动学反解的计算。 于M,则它们之间有M=A八2023年4月11日 文章浏览阅读28k次,点赞11次,收藏41次。机器人运动学逆解中最常见的三角方程详细推导过程机器人反解公式 机器人基础之运动学逆解概述求解腕点位置求解腕部方位*zyz*欧拉角具体求解算例MATLAB实现 概述 运动学逆解是指已知机器人末端位姿,求解各运动关节的位置,它是机器人运动规划和 机器人运动学逆解中最常用的三角方程(附代码) CSDN博客
反形机器破碎机厂家
反形机器 ,不易受检测对象物颜色(反射率)影响的小型三角测距式传感器追加了薄型系列产品,厚度与以往产品相比达到,更便于组装到机器内不易受对象物的状况(服装材料、颜色等部位(皮肤等)的影响,可稳定地进行检测(反射率)。此外,抗 下一代反洗钱方案:机器 人技术、语义分析 和 AI 作者:SAS 安全智能实践总监 David Stewart 数十年来,反洗钱 (AML) 一直是一个热门话题,也是金融机构一个日益严重的监管痛点。例如:《美国爱国者法案》扩大了对检测和报告的规定。纽约 504“最终规则 下一代反洗钱方案:机器人技术、语义分析和 AI SAS

日本机器人发展的反方向:非人型机器人
2015年10月18日 人形机器人是根据人类设计制作,最终目的之一是通过机器结构,电子设备,复杂算法,实现人体结构,类人情感,类人交流等的模拟效果。类似机器人如前台服务,医疗指南机器人,餐厅人形服务机器人等。该类型机器人在服务行业和娱乐行业有很大的前 2023年6月21日 我们认为上述这段文字形象的表明了人形机器人的意义和优势: 与其把所有工具全部重新设计,不如生产出能模仿人类外形和行为方式的机器人。 TA完美接入人类现有生活、进入所有人类已经存在的场景、使用所有人类正在使用的工具。 一句话,我们一切 人形机器人,一场事先张扬的反常识 腾讯新闻

双平行四边形码垛机器人的运动学分析及功能研究 豆丁网
2016年4月22日 结论在特殊结构的码垛机器人设计中,采用几何法进行运动学逆解运算,比一般的解析算法更加简单高效,便于实时控制;文中给出了四自由度双平行四边形码垛机器人的运动学算法,并实现了码垛与拆跺的功能设计,该算法已成功应用于公司生产的多款码垛 2023年6月22日 到2024年,全球机器人市场规模有望超650亿美元。 另据Markets and markets预测,全球人形机器人市场规模(仅考虑单机)将从2022年15亿美元提升至2027年的173亿美元(约合人民币1038亿元),千亿市场的容量指日可待。 从零售端的价格来看,此前美国波士顿动力推出 人形机器人,一场事先张扬的反常识澎湃号湃客澎湃新闻

ARM指令机器码学习——反汇编必学(作
2009年1月12日 原文链接:反汇编命令及elf,bin,hex之间的转换 汇编:把 汇编代码翻译成二进制机器代码 反汇编:把二进制机器代码翻译成汇编代码 汇编和反汇编是互逆的过程 前提:装了gccarmnoneeabi等交叉编译工具 2019年10月9日 川崎将省力型机器和系统的开发和生产视为重要任务,并成为日本工业机器人领域的先驱。 而反观中国机器人市场,我国的机器人起步较晚,经过四十多年的发展,大致发展经历了70年代的萌芽期,80年代的开发期,90年代后的实用化期。60 世界用了60年,中国30年,迎头赶上实现反超,中国机器人

6轴机器人正逆解和反解选解办法六轴逆解选解CSDN博客
2020年10月28日 最近在项目中用到了Auboi10机器人,遨博机器人跟UR机器人有很多共同点,都是模块化的协作机器人,它们构形相同。但是这两家公司的机器人还是有区别的,比如Aubo机器人的第三个关节是反着转的,跟UR机器人不一样。2022年7月6日 围绕流形上的反问题及其应用,建立基于流形约束优化的统一数学框架,形成配准与标准化问题表征的新理论与新方法。 相应成果发表于NeuroImage、IEEE TPAMI、IEEE TNNLS、IEEE TCyber、Pattern Recognition等国际顶级期刊和CVPR、IJCAI等顶级会议中,成果被引1700余次。【机器学习与反问题的数学理论系列报告】场 流形赋值的
NX MCD机器人的反算机构驱动 哔哩哔哩
2023年10月30日 9、对机器人的进行反算机构配置如图115,116 所示。规划机器人抓取到释放的动作路径。图115路径约束的位置配置 图116自动生成的仿真序列 10、配置信号适配器如图117所示导入握爪的抓握与释放参数,在信号中添加2个输入信号,公式如图所示 2019年8月23日 Joyce 关注 工业机器人之所以会有奇异点,是因为机器人是由数学控制(公式可以达到无限大),但移动的是真实物理部件,它无法实现无限大。 如果控制器命令机器人某个关节以无限大的角速度旋转180度时,机器人关节就会出现奇异点。 一、出现奇 工业机器人的奇异位形是什么样子的呢? 知乎

【机器人学、机器视觉与控制】臂形机器人——机器人运动
2020年11月22日 文章浏览阅读37k次,点赞6次,收藏40次。 文章目录ArmType Robots臂形机器人ArmType Robots臂形机器人常见的机械臂:a 一个6自由度串联机械臂。 通用工业机械臂它由一系列刚性连杆和转动关节组成,这种机械臂也是本文的主要讨论对象。 b 四个自由度的SCARA机器 精彩书摘|《机器人诺比系列:诺比的微型反重力装置》之选个机器人 前面的话 从上世纪四十年代起,艾萨克阿西莫夫的名字就与机器人紧密联系在了一起。 他在一系列有关人工智能的故事中创造 了“机器人三定律”,作为人工智能与人类相处时不成文的 精彩书摘|《机器人诺比系列:诺比的微型反重力装置》之选

逆平行四边形机构 百度百科
逆平行四边形机构 英文名称 antiparallelcrank mechanism 定 义 连杆与机架的长度相等、两个曲柄长度相等但转向相反的双曲柄机构。应用学科 机械工程(一级学科),机构学(二级学科),连杆机构(三级学科)2019年5月17日 针对轮式移动机器人存在模型不确定性、非线性以及未建模的动态特性等因素,严重影响系统轨迹跟踪的稳定性和精确性,提出一种基于系统模型不确定性补偿的反演复合控制策略。 基于非完整轮式移动机器人的运动学模型,采用反演控制思想以及李雅普诺夫稳定 基于模型不确定补偿的轮式移动机器人反演复合控制
集团新闻
煤碴破碎机
2021-12-03高细破碎机高细破碎机高细破碎机
2023-05-14鄂式破碎机工作电压
2021-11-06采石机械成都代理
2021-11-12选矿厂的生产成本核算
2020-02-08中国矿山设备厂.中国
2020-04-10粗碎机产量1600T H
2023-03-22砂石厂基本证件
2020-08-15标准圆锥液压破碎机总图
2023-05-12800*800型制砂机
2022-11-28破碎机工程车图片
2021-06-26矿区距民房安全距离
2023-06-04红砂岩欧版磨价格生产厂家有哪些
2022-09-27上海锤式破碎机
2021-01-27淄博厂灰钙机磨粉机设备
2022-04-30PE900×1200鄂式破碎机参
2022-03-06东城磨机配件
2020-01-07风扇磨煤机市场一般分哪些型号
2021-09-09选煤厂生产不稳定事故频繁分析
2023-05-05圆振动筛 鞍山
2021-08-15浙江江西求购洗砂机
2023-08-04湿料破碎磨粉机
2022-11-21采石场锂辉石种类
2022-10-17钡长石3r磨粉机
2022-04-14水渣铁设备多少钱一台
2022-06-22生物肥粉碎机
2021-10-25筛分机的装机容量
2021-11-23抚顺钢渣磁选设备
2022-06-02半导体锂云母立磨
2023-01-21北京超细磨机
2020-07-02


